My name is John Pineros and welcome to my personal website.
I’m a mechanical engineer from Toronto Canada. I have a personal love for robotics, in particular autonomous mobile systems. I just finished my Masters of Engineering from the University of Toronto. I got the chance to do a technical emphasis on Unmanned Aerial Systems from the University of Toronto Institute of Aerospace Studies. As part of my technical emphasis I got the chance to review the research topic related of multi agent motion planning published Dr.Dimitra Panagou from the University of Michigan Ann Arbor campus, with the supervision of Dr.Hugh Liu! Getting the opportunity to do a research project as part of my Masters program was a very eye opening experience. I got to implement my interpretation of the multiagent motion planner in both MATLAB and ROS1.
If you’d like to see a video of the multi-agent planner running in ROS1 check it out! https://www.youtube.com/watch?v=UqKj3HIz-3Y
This is a PDF copy of my actual submitted research report. For code examples in ROS1 or MATLAB please feel free to contact me!
More than just multi-agent planning
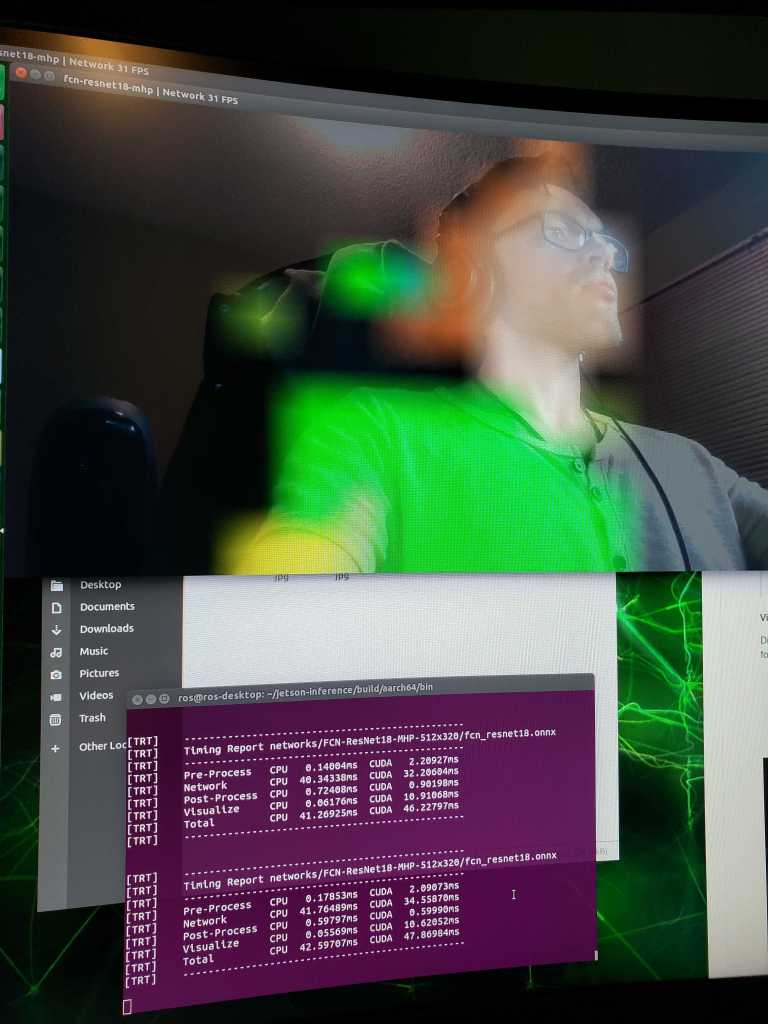
The idea of robotics is amazing because it gives the creativity of implementing topics which a few years ago were considered science fiction! One cool example of this is Machine Vision and Machine Learning. Personally, I like to look into what tools are out there related to this and one tool which I’ve gotten some exposure to has been the Nvidia Jetson Nano. This is a very powerful embedded platform which has huge application potential in robotics. Bellow is an example of me trying out the out of the box example of the ResNet18 Multi Human Parser being applied on the Jetson Nano! Running close to 30 fps this allowed for rather fast image processing using an Intel RealSense RGBD camera!

Leave a comment